Arsenii Iarmolinskii
Управление двигателем постоянного тока на Arduino UNO
Разработку системы управления двигателем можно разбить на несколько модулей:
- Таймер, регулирующий частоту главного цикла программы
- Драйвер энкодера (считывание текущего угла)
- Драйвер двигателя (выдача требуемого напряжения)
- Вычислитель скорости (определение текущей скорости вала двигателя)
- ПИ регулятор скорости (управление скоростью)
- П регулятор положения (управление положением)
Общая структура программы
void loop()
{
///////// TIMER /////////
// Задание постоянной частоты главного цикла прогааммы
static uint32_t timer = micros();
while(micros() - timer < Ts_us)
;
timer = micros();
///////// SENSE /////////
// Считывание датчиков
///////// PLAN /////////
// Расчет управляющих воздействий
///////// ACT /////////
// Приведение управляющих воздействий в действие и логирование данных
}
Выдержка постоянной частоты
Зададимся требуемым периодом выполнения главного цикла программы:
#define Ts_us 5000 // Период квантования в [мкс]
#define Ts_s (Ts_us / 1000000.0) // Период квантования в [с]
И реализуем адаптивную задержку в начале void loop():
void loop()
{
static uint32_t timer = micros();
while(micros() - timer < Ts_us)
;
timer = micros();
///
...
}
Теперь главный цикл будет выполнятся не чаще чем раз в 5 миллисекунд.
Драйвер энкодера
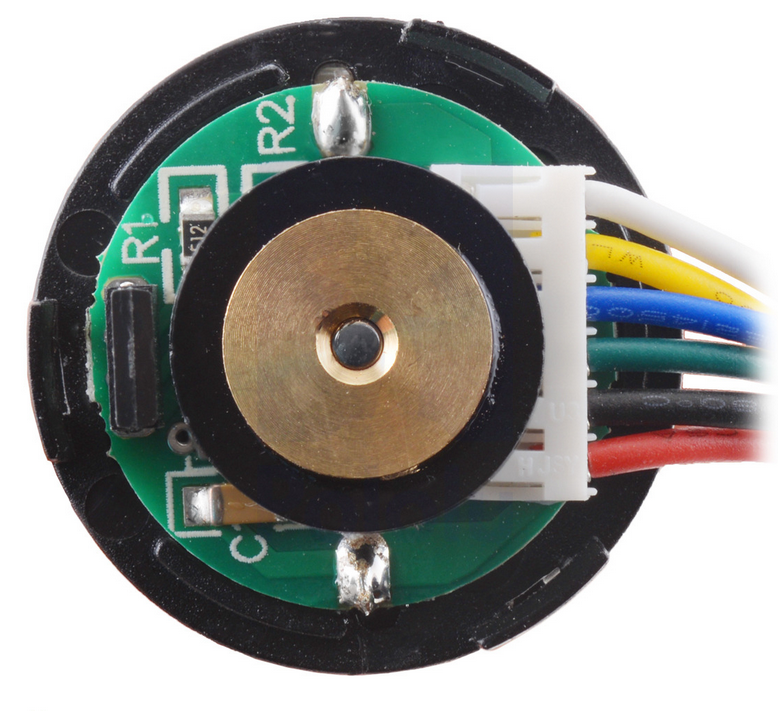
Используемые двигатели постоянного тока оборудованы на задней части вала квадратурным инкрементальным энкодером, с помощью которого есть возможность замкнуть обратную связь по скорости и положению мотора.
Определение положения
Параметры энкодера
#define ENC_PIN_A 2
#define ENC_PIN_B 3
#define ENC_PORT PIND
#define ENC_MASK 0b00001100
#define ENC_SHIFT 2
#define ENC_DIR 1
#define ENC_PPR 48
#define GEAR_RATIO 47
PIN CHANGE INTERRUPTS
Квадратурный экодер при вращении вала генерирует сигналы A и B следующего вида:
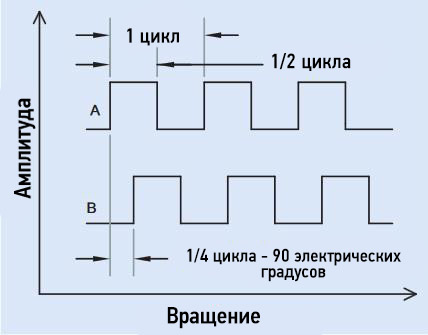
Для использования полной точности энкодера необходимо использование всех 4х фронтов сигналов внутри одного периода, чего можно добится с использованием прерываний по изменению пина (Pin change interrupts). В отличие от обычных внешних прерываний, которые прикрепляются с помощью функции attachInterrupt(), которых очень ограниченное количество (всего два пина на Arduino UNO), прерывания PCINT можно активировать для абсолютно любых пинов Ардуино, что позволяет использовать этот метод чтения энкодера с любым количеством подключенных энкодеров не теряя в точности.
Для включения этих прерываний необходимо выполнить три действия: 1) Включить прерывания по изменению пина 2) Выберить, на каких портах и пинах выполнять прерывания 3) Реализовать обработчик ISR для нужных портов
1. Включение прерываний
В нашем случае энкодер подключен на пины 2 и 3, что соответствует пинам PD2 и PD3, которые принадлежат порту D.
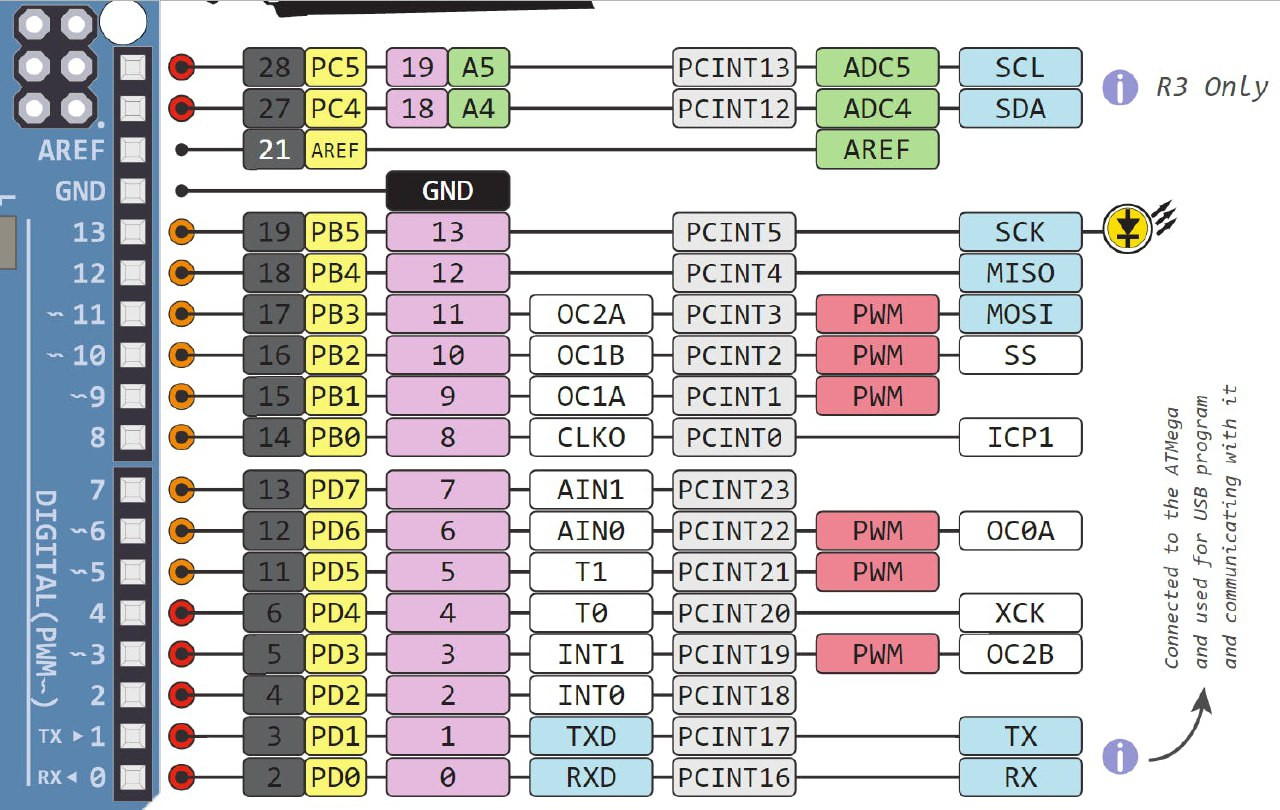
Для включения прерываний PCINT на этом порту выставим третий бит в регистре PCICR:
PCICR |= 0b00000100; // Включить на порту D

2. Выбираем нужные пины
Энкодер подключен на пины PD2 и PD3, что соответствует каналам PCINT18 и PCINT19.



PCMSK2 |= 0b00001100; // Включить пины PD2 & PD3 (PCINT18 и PCINT19)
3. Пишем обработчик прерывания
Внешний вид обработчика выглядит следующим образом. Далее приведен более подробный его разбор.
ISR(PCINT2_vect) // Port D, PCINT16 - PCINT23
{
const uint8_t enc = ((*ENC_PORT) & ENC_MASK) >> ENC_SHIFT;
counter += ett[enc_zn1][enc];
enc_zn1 = enc;
}
Более подробно про их использование можно прочитать здесь на русском, или здесь на английском.
Обработчик прерывания
Определение направления вращения двигателя можно реализовать следующим образом. Сигналы A и B можно скомбинировать в двухбитное целое число. В зависимости от текущей фазы поворота двигателя - это число может принимать значения 00, 01, 11 и 10. Из предыдущего и текущего значения фазы можно однозначно определить в какую сторону был повернут вал двигателя.
Для решения этой задачи составим таблицу ett (encoder transition table), в которой для каждой комбинации предыдущего значения и текущего значения фазы энкодера определяется направление инкремента соответствующее данной комбинации:
| 00 | 01 | 11 | 10 | |
|---|---|---|---|---|
| 00 | 0 | -1 | 0 | 1 |
| 01 | 1 | 0 | -1 | 0 |
| 11 | 0 | 1 | 0 | -1 |
| 10 | -1 | 0 | 1 | 0 |
Таким образом, в обработчике прерываний для определения направления проворота вала двигателя достаточно обратится в таблицу и прочитать соответствующее значение.
volatile int counter = 0;
float phi = 0;
float tick_to_rad = 0;
int8_t ett[4][4] = {0};
void encoder_init()
{
// Инициализация пинов энкодера
pinMode(ENC_PIN_A, INPUT);
pinMode(ENC_PIN_B, INPUT);
// https://thewanderingengineer.com/2014/08/11/arduino-pin-change-interrupts/
// Настройка прерываний энкодера
noInterrupts(); // Временное отключение прерываний
PCICR |= 0b00000100; // turn on port D change interrupts
PCMSK2 |= 0b00001100; // turn on pins PD2 & PD3 (D2 and D3)
// Настройка таблицы переходов
ett[0b00][0b10] = ENC_DIR;
ett[0b10][0b11] = ENC_DIR;
ett[0b11][0b01] = ENC_DIR;
ett[0b01][0b00] = ENC_DIR;
ett[0b00][0b01] = -ENC_DIR;
ett[0b01][0b11] = -ENC_DIR;
ett[0b11][0b10] = -ENC_DIR;
ett[0b10][0b00] = -ENC_DIR;
// Расчет коэффициента пересчета
tick_to_rad = 2.0 * M_PI / (ENC_PPR * GEAR_RATIO);
// Включение прерываний
interrupts();
}
Обработчик прерываний:
ISR(PCINT2_vect) // Port D, PCINT16 - PCINT23
{
static uint8_t enc_zn1 = 0;
const uint8_t enc = (ENC_PORT & ENC_MASK) >> ENC_SHIFT;
// xxxxABxx
// & 00001100
// 0000AB00
// >>2
// enc = 000000AB
counter += ett[enc_zn1][enc];
enc_zn1 = enc;
}
Подсчет реального угла двигателя
Функция считывает накопленное прерываниями количество тиков энкодера и пересчитывает их в угол вала в радианах. tick_to_rad - коэффициент пересчета из тиков энкодера в радианы угла поворота двигателя.
void encoder_tick()
{
noInterrupts();
const int16_t counter_inc = counter;
counter = 0;
interrupts();
phi += counter_inc * tick_to_rad;
}
В результате в переменную phi будет сохранен текущий угол вала двигателя в радианах.
Драйвер мотора
Параметры мотора:
#define MOTOR_IN 10
#define MOTOR_PWM 11
#define MOTOR_DIR 1
#define SUPPLY_VOLTAGE 12
Инициализация мотора:
void motor_init()
{
pinMode(MOTOR_IN, OUTPUT);
pinMode(MOTOR_PWM, OUTPUT);
}
Выдача напряжения:
void motor_tick(float u)
{
const int16_t pwm = 255.0 * constrain(u / SUPPLY_VOLTAGE, -1.0, 1.0) * MOTOR_DIR;
if (pwm >= 0)
{
digitalWrite(MOTOR_IN, LOW);
analogWrite(MOTOR_PWM, pwm);
}
else
{
digitalWrite(MOTOR_IN, HIGH);
analogWrite(MOTOR_PWM, 255 + pwm);
}
}
Вычислитель скорости
Вычисление производной с фильтрацией:
float velocity_estimator(float pos)
{
static float pos_old = pos;
static float vel = 0;
const float delta_pos = pos - pos_old;
const float inst_vel = delta_pos / Ts_s;
const float filtering = 0.3;
vel = (1.0 - filtering) * inst_vel + filtering * vel;
pos_old = pos;
return vel;
}
ПИ регулятор скорости с защитой от насыщения
float vel_pi_reg(float err, float max_output)
{
const float K = 3;
const float T = 0.01;
const float Kp = K;
const float Ki = K / T;
const float p = err * Kp;
static float I = 0;
const float i = I * Ki;
const float u = p + i;
if (u == constrain(u, -max_output, max_output) || (err * u) < 0)
I += err * Ts_s;
return u;
}
Использование ПИ регулятора:
void loop()
{
...
const float vel0 = (analogRead(A1) - 512) / 50.0;
///////// PLAN /////////
const float vel = velocity_estimator(phi);
const float err = vel0 - vel;
const float u = vel_pi_reg(err, SUPPLY_VOLTAGE);
///////// ACT /////////
motor_tick(u);
...
}
П регулятор положения
void loop()
{
...
const float pos0 = (analogRead(A1) - 512) / 50.0;
///////// PLAN /////////
const float Kp_phi = 1;
const float vel0 = (pos0 - phi) * Kp_phi;
const float vel = velocity_estimator(phi);
const float err = vel0 - vel;
const float u = vel_pi_reg(err, SUPPLY_VOLTAGE);
///////// ACT /////////
motor_tick(u);
...
}
Приложение
Полный код программы управления:
// motor_control.ino
#include "encoder.h"
#include "motor.h"
#define Ts_us 5000 // Период квантования в [мкс]
#define Ts_s (Ts_us / 1000000.0) // Период квантования в [с]
void setup()
{
Serial.begin(115200);
encoder_init();
motor_init();
pinMode(A1, INPUT);
}
void loop()
{
///////// TIMER /////////
// Задание постоянной частоты главного цикла прогааммы
static uint32_t timer = micros();
while(micros() - timer < Ts_us)
;
timer = micros();
///////// SENSE /////////
// Считывание датчиков
const float pos0 = (analogRead(A1) - 512) / 50.0;
encoder_tick();
///////// PLAN /////////
// Расчет управляющих воздействий
const float Kp_phi = 30;
const float vel0 = (pos0 - phi)*Kp_phi;
const float vel = velocity_estimator(phi);
const float err = vel0 - vel;
const float u = vel_pi_reg(err, SUPPLY_VOLTAGE);
///////// ACT /////////
// Приведение управляющих воздействий в действие и логирование данных
motor_tick(u);
Serial.print(" pos0: " );
Serial.print(pos0);
Serial.print(" phi: " );
Serial.print(phi);
Serial.println();
}
float velocity_estimator(float pos)
{
static float pos_old = pos;
static float vel = 0;
const float delta_pos = pos - pos_old;
const float inst_vel = delta_pos / Ts_s;
const float filtering = 0.3;
vel = (1.0 - filtering) * inst_vel + filtering * vel;
pos_old = pos;
return vel;
}
float vel_pi_reg(float err, float max_output)
{
const float K = 3;
const float T = 0.01;
const float Kp = K;
const float Ki = K / T;
const float p = err * Kp;
static float I = 0;
const float i = I * Ki;
const float u = p + i;
if (u == constrain(u, -max_output, max_output) || (err * u) < 0)
I += err * Ts_s;
return u;
}
// encoder.h
#pragma once
#define ENC_PIN_A 2
#define ENC_PIN_B 3
#define ENC_PORT PIND
#define ENC_MASK 0b00001100
#define ENC_SHIFT 2
#define ENC_DIR 1
#define ENC_PPR 48
#define GEAR_RATIO 47
volatile int counter = 0;
float phi = 0;
float tick_to_rad = 0;
int8_t ett[4][4] = {0};
void encoder_init()
{
// Инициализация пинов энкодера
pinMode(ENC_PIN_A, INPUT);
pinMode(ENC_PIN_B, INPUT);
// Настройка прерываний энкодера
PCICR |= 0b00000100;
PCMSK2 |= 0b00001100;
// Настройка таблицы переходов
ett[0b00][0b10] = ENC_DIR;
ett[0b10][0b11] = ENC_DIR;
ett[0b11][0b01] = ENC_DIR;
ett[0b01][0b00] = ENC_DIR;
ett[0b00][0b01] = -ENC_DIR;
ett[0b01][0b11] = -ENC_DIR;
ett[0b11][0b10] = -ENC_DIR;
ett[0b10][0b00] = -ENC_DIR;
// Расчет коэффициента пересчета
tick_to_rad = 2.0 * M_PI / (ENC_PPR * GEAR_RATIO);
interrupts();
}
ISR(PCINT2_vect) // Port D, PCINT16 - PCINT23
{
static uint8_t enc_zn1 = 0;
const uint8_t enc = (ENC_PORT & ENC_MASK) >> ENC_SHIFT;
// xxxxABxx
// & 00001100
// 0000AB00
//>>2
// 000000AB
counter += ett[enc_zn1][enc];
enc_zn1 = enc;
}
void encoder_tick()
{
noInterrupts();
const int16_t counter_inc = counter;
counter = 0;
interrupts();
phi += counter_inc * tick_to_rad;
}
// motor.h
#pragma once
#define MOTOR_IN 10
#define MOTOR_PWM 11
#define MOTOR_DIR 1
#define SUPPLY_VOLTAGE 12
void motor_init()
{
pinMode(MOTOR_IN, OUTPUT);
pinMode(MOTOR_PWM, OUTPUT);
}
void motor_tick(float u)
{
const int16_t pwm = 255.0 * constrain(u / SUPPLY_VOLTAGE, -1.0, 1.0) * MOTOR_DIR;
if (pwm >= 0)
{
digitalWrite(MOTOR_IN, LOW);
analogWrite(MOTOR_PWM, pwm);
}
else
{
digitalWrite(MOTOR_IN, HIGH);
analogWrite(MOTOR_PWM, 255 + pwm);
}
}