Arsenii Iarmolinskii
Настройка регулятора скорости на моторе постоянного тока
1. Написание драйверов мотора и энкодера
Прежде чем переходить к настройке регулятора скорости необходимо написать функции взаимодействия с нашим мотором. Предположим, что они называются у нас следующим образом:
// Выдача управления на мотор
void motor_set(float u);
// Чтение энкодера
float encoder_get();
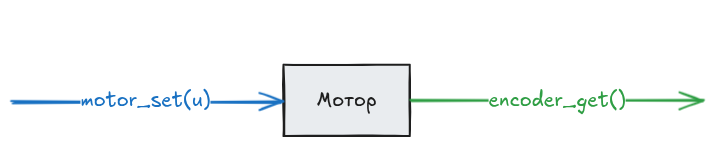
Внутри этих функций будет происходить вся работа с ШИМом, прерываниями и всеми подобными штуками. Мы же об этом думать не думаем и будем работать с мотором как с коробкой, в которую мы можем подать некоторые данные на вход (управляющее воздействие) и прочитать какие-то выходные данные (угол поворота энкодера):
Требования к драйверам мотора и энкодера
- Драйвер мотора принимает значения разного знака. Изменение знака изменяет направление вращения мотора.
- Драйвер энкодера определяет угловое перемещение мотора, а не его путь. Поворот мотора в одну сторону должне значение энкодера увеличивать, а в другую — уменьшать.
Это связано с тем, что нам важно знать не только модуль величины (напряжения на моторе и его угол поворота), но и его знак.
2. Создание главного цикла
Для надежной работы регуляторов критически важно иметь быстрый и неблокирующий цикл с постоянным временем выполнения. Это обеспечивает стабильность настроек регулятора.
Допустим, у нас один единственный мотор и void loop() находится в нашем полном распоряжении. Выглядеть он будет примерно так:
void loop() {
// TIMER
smart_delay(5);
// SENSE
float current_angle = encoder_get();
// PLAN
float u = speed_controller(target_vel, current_angle);
// ACT
motor_set(u);
}
Цикл разделен на 4 области, согласно идеологии ITSPA:
- TIMER - обеспечение постоянного времени выполнения цикла
- SENSE - чтение данных с датчиков
- PLAN - расчет управляющих воздействий на итерацию
- ACT - выполнение управляющих воздействий на мотор
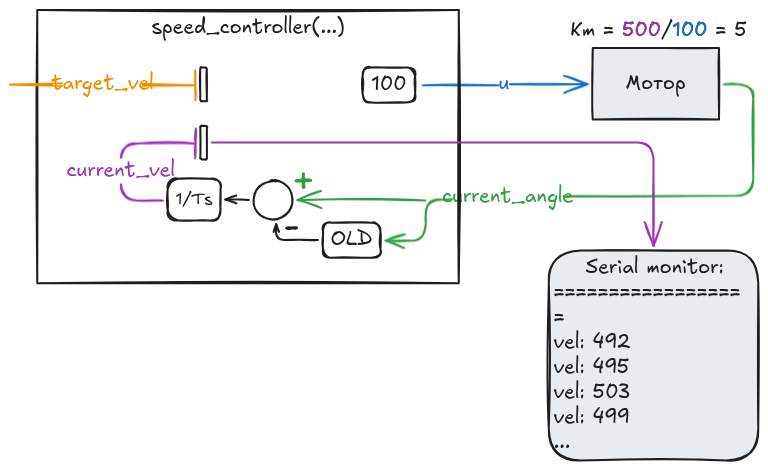
Теперь нашу систему можно нарисовать следующим образом:
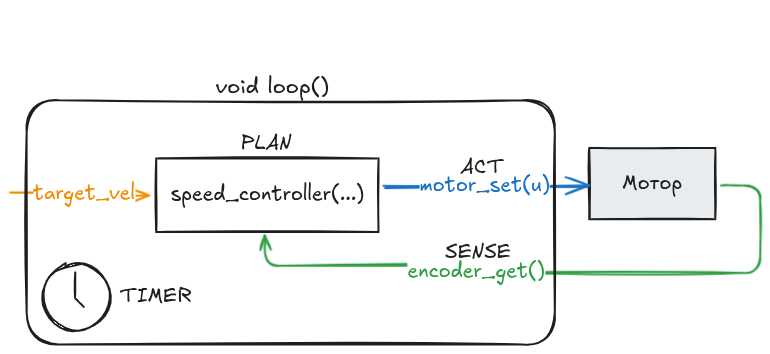
Мотор на схеме изображен серым цветом, поскольку эта часть нашей системы неизменяема. Все что мы пишем сами изображено белым цветом.
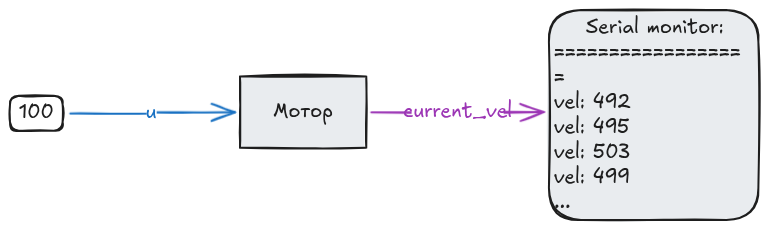
Однако такую схему рисовать громоздко, поэтому мы ее преобразуем так:
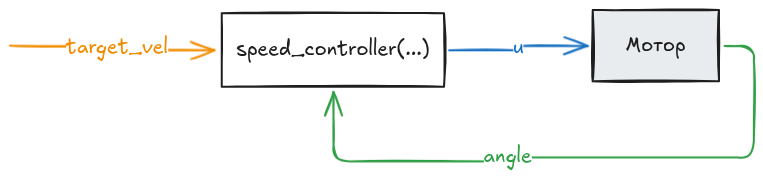
Что изменилось?
Каждая стрелочка обозначает какой-либо сигнал в нашей системе. Его название написано на самой стрелочке. Наша задача - реализвать блок speed_controller так, чтобы мотор в реальном мире крутился со скорость target_vel.
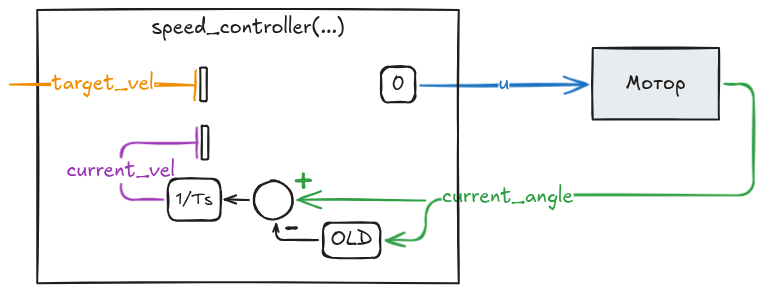
3. Вычисление скорости вращения мотора
Первая задача которая перед нами стоит - найти скорость вращения нашего мотора.
float speed_controller(float target_vel, float current_angle)
{
// Вычисление скорости вращения мотора
static float old_angle = 0;
float delta_angle = current_angle - old_angle;
float delta_time = Ts_s;
float current_vel = delta_angle / delta_time;
old_angle = current_angle;
///////
//...//
///////
return 0;
}
4. Измерение характеристик мотора
С использованием полученной скорости мы осуществим один из важнейших экспериментов, необходимых для настройки регулятора скорости мотора.
Измерение коэффициента усиления
Первое - нам необходимо подать на мотор какое-то постоянное управляющее воздействие и узнать его вычисленную скорость. Если мы поделим скорость на входное воздействие, мы получим коэффициент усиления нашего мотора $K_m$.
float speed_controller(float target_vel, float current_angle)
{
// Вычисление скорости вращения мотора
static float old_angle = 0;
float delta_angle = current_angle - old_angle;
float delta_time = Ts_s;
float current_vel = delta_angle / delta_time;
old_angle = current_angle;
////
+ Serial.print("vel: ");
+ Serial.println(current_vel);
///////
//...//
///////
- return 0;
+ return 100;
}
Пусть для нашего гипотетического мотора получился $K_m = 5$. Это значит, что измеренная скорость вращения будет в 5 раз больше, чем поданное ему на вход значение. Например, как в эксперименте, мы подали на вход значение $100$ (допустим ШИМ), и измеренная скорость была равна $100 * 5 = 500$ попугаев в секунду.
Оценка большой постоянной времени
Второе - нам необходимо оценить насколько долго мотор разгоняется до установившейся скорости. Самый простой способ это сделать - на слух.
Мы выключаем мотор. Потом резко его включаем (например снимаем питание и снова подаем) и слушаем его звук. Он будет некоторое время изменятся в высоте, после чего остановится и будет гудеть неизменно.
Нам необходимо определить это время и запомнить его. Это будет наша большая постоянная времени, обозначаемая как $T_m$.
Ниже приведены примерные звуки разгона двигателя с разными постоянными времени, от 0.1с до 1с.
$T_m = 0.1s$
$T_m = 0.2s$
$T_m = 0.3s$
$T_m = 0.5s$
$T_m = 1.0s$
Оценка малой постоянной времени
Наши микроконтроллеры имеют неизбежную задержку в обработке данных, выдаче управления, вызванную тем, что они работают в цикле с фиксированным временем выполнения. Быстрее времени одной итерации цикла МК отреагировать на изменения окружающей среды не может. Это минимальное время реакции робота на изменение окружающей среды мы будем называть малой постоянной времени и обозначать как $T_\mu$